歡迎進入東莞市諾元電機設備有限公司官網!公司主營:無刷繞線機,電機繞線機,馬達繞線機,定子繞線機,飛叉繞線機,高速繞線機等!
諾元視頻號


0769-81551289
150-1531-7403(微信同號)
諾元視頻號
0769-81551289
150-1531-7403(微信同號)
步進電機是生產生活中比較常用的一種電機,相對于伺服電機來說,很多地方都可以代替,技術已經比較成熟,深受廣大客戶的青睞。

有的朋友對于步進電機比較好奇,不知道其具體的控制方法,還有就是線圈的繞線工序,下面諾元簡單的給大家分析一下吧!希望可以幫助到大家!
步進電機控制方法:
1.單步控制方法:這種控制方式比較基礎,一般用來實現比較簡單的運動控制,具體就是每次只需要控制轉一個步距角度,正因為如此,所以一般控制精度都不高,運用領域要求也不高。
2.半步控制方法:這其實就是單步控制基礎上進行了升級,具體就是每次只需要控制轉半個步距角度,通過這種半步控制方式,來實現更為精準的控制。
3.微步控制方法:有了半步控制的思維,可將電機每一步距拆分為更小的步距,也就是微步距,對電機進行準確的調節,控制精度可以達到更高的狀態,一般需要專門的微步驅動器。
4.閉環控制方法:主要由反饋系統,實現準確的速度及位置控制,可以實現更高的控制精度,控制更為穩定,一般要配備專門的驅動器和編碼器等,應用領域更精細化,但成本較高。
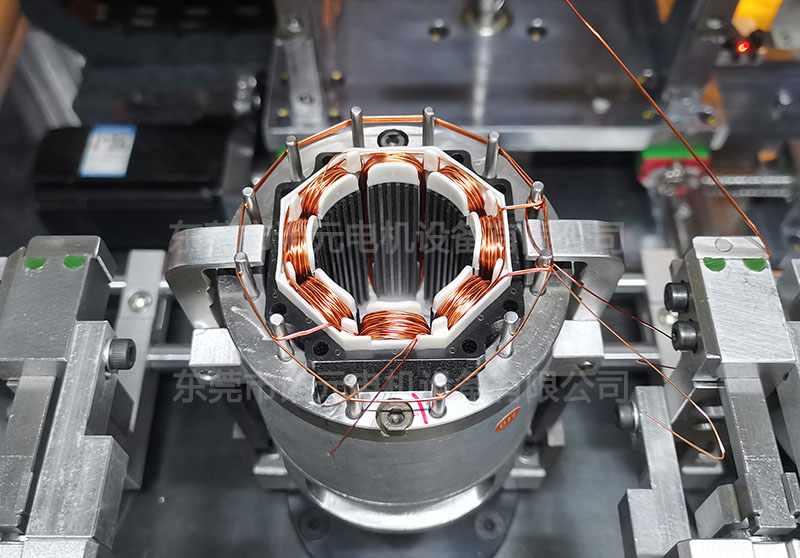
步進電機定子繞線方法:
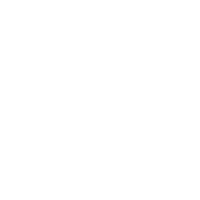
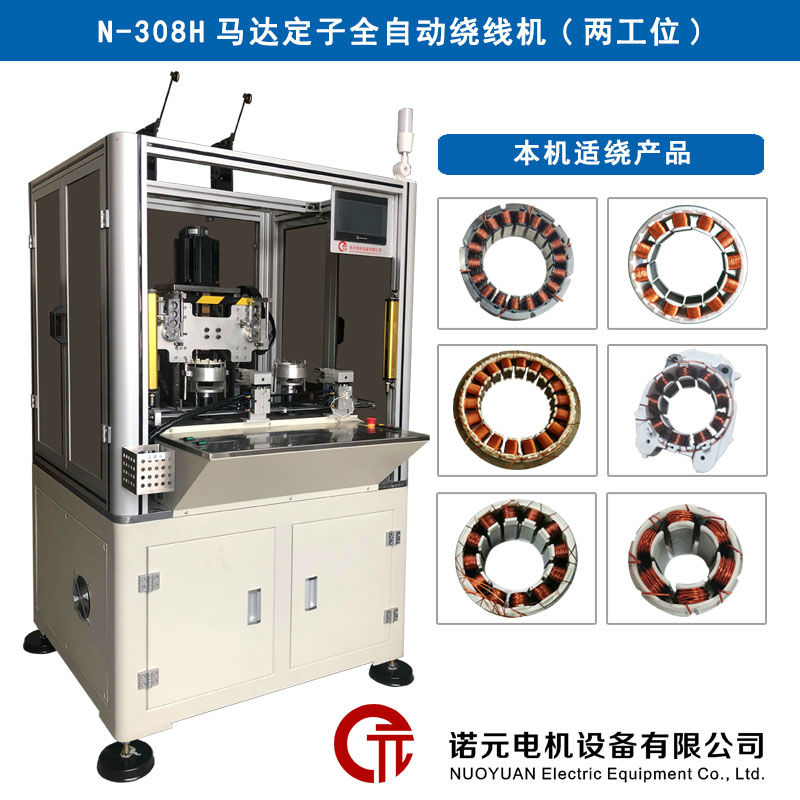
步進電機有多種多樣的型號,常見的有42、57、86等,其實說的就是定子的規格型號,定子需要纏繞漆包線,一般采用專門的內繞機來進行繞線,根據步進電機定子的參數,可選用雙工位,四工位、六工位等內繞機設備,可以單線或者雙線并繞的方式,繞線時要注意選擇優質的繞線機設備和廠家,調試好機器繞線機設備,避免出現傷線、斷線、擦線、刮線等問題。




 掃描二維碼,關注諾元公眾號
掃描二維碼,關注諾元公眾號